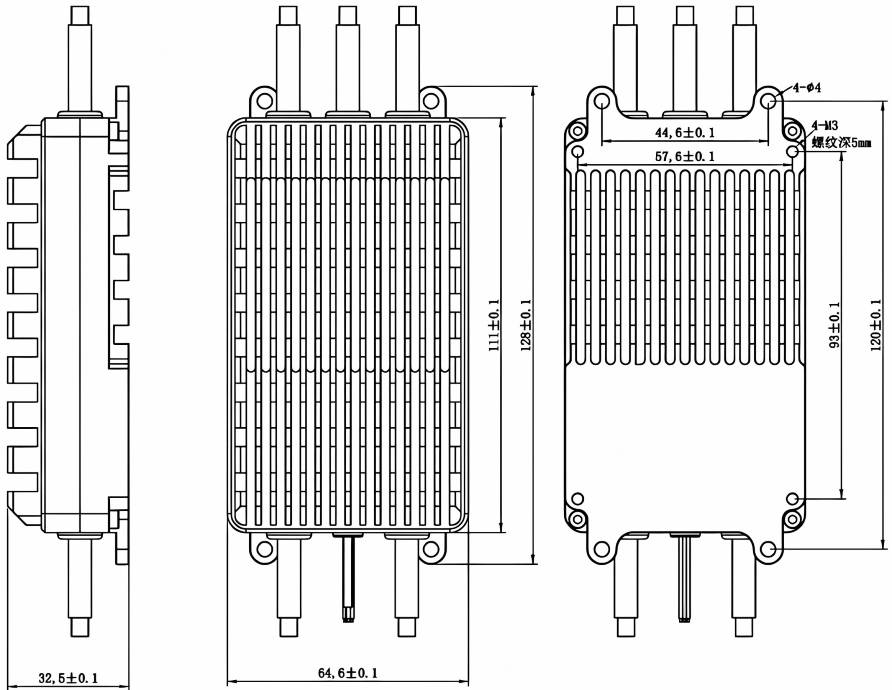
ROCK 120A-H 算法优化升级,电机兼容更好,输出功率提升固件默认进角调试版,可选固化版,可开启最大功率模式工业级专业程序,安全可靠高可靠启动算法,无惧逆风启动剧变油门抗丢相,快速油门响应,降低坠机风险高度智能化,自适应工作参数安全匹配规格:120A 12~26S 淘宝官方购买 产品特点&保护功能 技术参数 用户手册文档 产品特点 优质元器件,性能可靠低内阻MOS,瞬时耐流强串口输出实时数据:电源电压、电机转速、电流、电调温度及调试数据等屏蔽信号线降低干扰光电隔离的信号输入、输出接口隔离干扰轻量化设计,简单易用,稳定可靠,抗干扰能力强,调速性能良好 保护功能 低压保护:默认关闭(可定制开启)。 高压保护:电源电压超过允许值时禁止电机启动。启动保护:启动不成功,限制启动电流,自动重新启动。堵转保护:正常运转中发生堵转(一般为外力所致)尝试重新启动(注意高油门时发生堵转可能损坏电调)。过温保护:温度超过115°C,最大输出功率缓慢降低,最多可降至满油门功率40%,温度降低后恢复原功率。 过流保护:限制峰值电流不超极限值。 过载保护:当识别到电机负载过重时,会限制最大油门以保护动力系统。 失控保护:丢失信号200ms后逐渐降低输出功率,在1~2秒内为快速降低油门到50%以下,然后缓慢降低油门至停机。 基础参数 型号:ROCK 120A-H电压:12~26S尺寸:111*64.6*32.5mm重量:370g(含线材)持续工作电流:70A(特定散热)最大工作电流(3秒):120A待机功耗:≤10mA@100V油门行程范围:1000~2000us防水等级:IP54(可定制IP67) 电源线:硅胶线-红色/黑色-8AWG-150mm三相线:硅胶线-黑色-8AWG-100mm信号线: UL1533-24AWG-灰色-530mm油门刷新率:50~500Hz(建议100~400Hz)数据反馈线:PVC排线-30芯—黑红白-70mmBEC:无输入信号电平:3.3~5V温度保护点:115℃通讯方式:PWM(可选PWM+CAN版本)运行环境温度:-20~+65℃ 工程图 无刷电调使用说明书 CKESC电调进角调试流程